Yunqi Capital Portfolio x GTC 2025: Spatial Intelligence, RoadAGI — What New Moves Are the Unicorns Pulling? | Yunqi Capital

Let AI Connect to the Physical World

Known as the "Super Bowl of AI," the GTC conference is underway in San Jose, California. With 1,000 sessions, 2,000 speakers, and 400 exhibitors, this year's event has become the largest in its history as AI technology evolves rapidly. Beyond Jensen Huang's keynote and NVIDIA's slate of new product launches, new offerings and perspectives from AI companies are a major draw.
As active innovators in spatial intelligence and intelligent driving, Yunqi Capital portfolio companies Manycore Tech and DeepRoute.ai made appearances at GTC, showcasing a new technical landscape ranging from 3D spatial understanding to road-based general intelligence. What new moves did these two AI unicorns unveil? This edition of Yunqi Capital takes you through the details.

Open-Source Spatial Understanding Model
Powers Embodied Intelligence Training
On March 19, Manycore Tech announced the open-source release of SpatialLM, a spatial understanding model, at GTC 2025. It is a 3D scene semantic generation framework built on large language models.
The model can generate physically accurate 3D scene layouts from just a single video. Unlike traditional large language models, SpatialLM breaks through limitations in understanding the geometry and spatial relationships of the physical world, giving machines human-like spatial cognition and parsing capabilities. SpatialLM is now open to developers worldwide on platforms including HuggingFace, GitHub, and ModelScope.
"We aim to build an embodied intelligence training platform that closes the loop from spatial cognitive understanding to spatial action interaction," said Huang Xiaohuang, chairman of Manycore Tech. "The SpatialLM model we're open-sourcing this time is designed to help embodied intelligent robots complete foundational training in spatial cognitive understanding. Last year, Manycore Tech released SpatialVerse, a spatial intelligence solution that we hope will further use synthetic data to build 'digital dojos' closest to physical reality for robots, enabling action-interaction training in simulated environments."
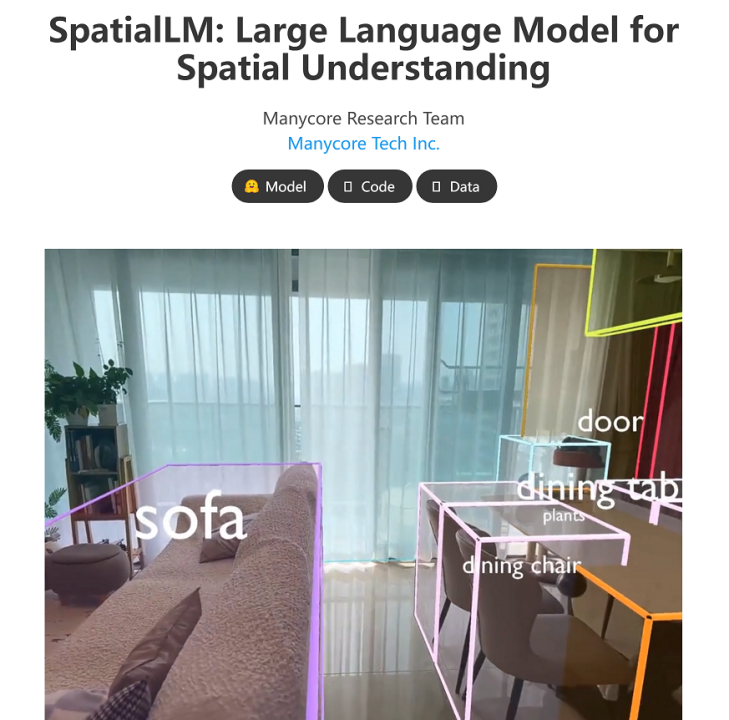
Manycore Tech's SpatialLM model open-source page
Manycore Tech's spatial intelligence platform SpatialVerse was another highlight at GTC. It "collaborates" with the SpatialLM model to close the loop between "reality — virtual — reality." For example, the SpatialLM model transforms real-world data into rich scenes in virtual environments by converting video into structured scenes. Then, through SpatialVerse's synthetic data engine, a single structured scene can be generalized to generate hundreds of millions of new scenarios. This means the real world becomes the raw material source for SpatialVerse's "digital dojo."

Road General Intelligence Platform Unveiled
AI-Driven Mobile Agents
On March 18, Zhou Guang, CEO of DeepRoute.ai, delivered a technical keynote at GTC 2025, presenting the company's latest strategic vision, RoadAGI, and unveiling the road general intelligence platform — AI Spark.
RoadAGI is a critical step toward DeepRoute.ai's goal of achieving general artificial intelligence in the physical world, aiming to give mobile agents — including intelligent driving vehicles — the ability to autonomously navigate roads and deeply interact with the physical world. The Spark platform is DeepRoute.ai's AI platform built to realize road general intelligence. By training on massive amounts of high-quality anonymized road driving data, it will understand the laws of the physical world and give mobile agents running on the platform cross-indoor-outdoor, any-point-to-point mobility capabilities.

DeepRoute.ai's first iteration of RoadAGI, Spark 1.0
Additionally, DeepRoute.ai has applied a Vision-Language-Navigation (VLN) model on the Spark platform. Through VLN, mobile agents will be able to navigate based on natural language instructions, understanding both the instructions and surrounding visual information, then combining this with their own state in the environment to take appropriate actions and reach the target location.
The Spark platform also allows mobile agents to move from any point to any point without relying on navigation maps, instead understanding their surroundings and interacting with pedestrians and external obstacles to obtain necessary information.
Zhou Guang stated: "At this stage, DeepRoute.ai will continue to advance cutting-edge AI technology, building practical and accessible intelligent driving systems to empower automakers' intelligent upgrades. As production vehicle scale increases, DeepRoute.ai will use massive amounts of high-quality data to make the Spark platform smarter and adaptable to more forms of intelligent agents. First achieve RoadAGI, then move toward general artificial intelligence in the physical world."