Yunqi Capital Research | Embodied Intelligence in Industrial Scenarios: In-Depth Analysis of Capabilities and Applications

Full Throttle · Yunqi Capital New Year Goods Collection Vol. 1

The Lunar New Year is fast approaching, but AI — which knows no holidays — has no intention of slowing down.
From the fresh wave of A2A discourse sparked by OpenClaw, to major internet platforms racing to weave AI into red-envelope campaigns and interactive experiences; from the steadily rising "robot density" on the Spring Festival Gala stage, to the industry's intense focus on DeepSeek's next moves — one thing is certain: the upcoming Year of the Horse will be a year where AI runs at full throttle.
At this pace, Yunqi Capital is also running at full throttle, with both thinking and execution maxed out. In the final week before the holiday, we're maintaining high-intensity operations. We're proud to present "Full Throttle: The Yunqi New Year's Collection" — sharing our ongoing industry research, founder conversations, hot-topic tracking, and annual business review as a special gift.
Our first "New Year's goodie" concerns the tech protagonist that's already locked down center stage at the Spring Festival Gala: embodied intelligence.
For over a decade, industrial robots have formed a highly stable foundational layer in modern manufacturing systems. The control and verification frameworks built around deterministic processes, structured environments, and highly repetitive tasks have enabled large-scale robot deployment in automotive manufacturing, 3C electronics, warehousing, and logistics.
In recent years, rapid advances in multimodal models, VLA (Vision-Language-Action), and Agent architectures have pushed robotics into another acceleration phase. "Embodied intelligence" has thus become a new variable drawing intense industry and capital attention, with expectations of penetrating more complex industrial and logistics scenarios.
But from an investment and engineering deployment perspective, a more critical question is emerging: What new problems does embodied intelligence actually solve in real industrial scenarios? Can these capabilities produce sustainable engineering solutions under the constraints of cycle time, precision, and reliability?**
To address these questions, Yunqi's investment team conducted a systematic analysis at its first internal sharing session of 2026. This edition of the "Yunqi Research Report" brings you selected highlights.
This article focuses on,
in real-world manufacturing and logistics scenarios:
1
Where exactly does embodied intelligence add capabilities beyond traditional industrial robots?
2
Given engineering and data constraints, which directions merit pursuit now?
3
How well do different sub-scenarios match the current stage of embodied intelligence technology?
Traditional Industrial Robots vs. Embodied Intelligence:
Methodological Differences Under Two Distinct Engineering Assumptions
In industrial and logistics scenarios, traditional industrial robots and embodied intelligence are not successive upgrades along the same path, but two distinct methodological systems built on different engineering assumptions. They differ structurally in task modeling, action generation, and generalization approaches.
The core of the traditional industrial robot methodology is fixed-trajectory interpolation and optimized control. Centered on a hierarchical pipeline driven by geometric/kinematic models, with clear interface contracts that are auditable and verifiable, its strengths lie in high precision, stable cycle times, and safety certification; but when facing long-tail variations like occlusion, mixed materials, or frequent changeovers, calibration, tooling, planning, and debugging costs escalate.
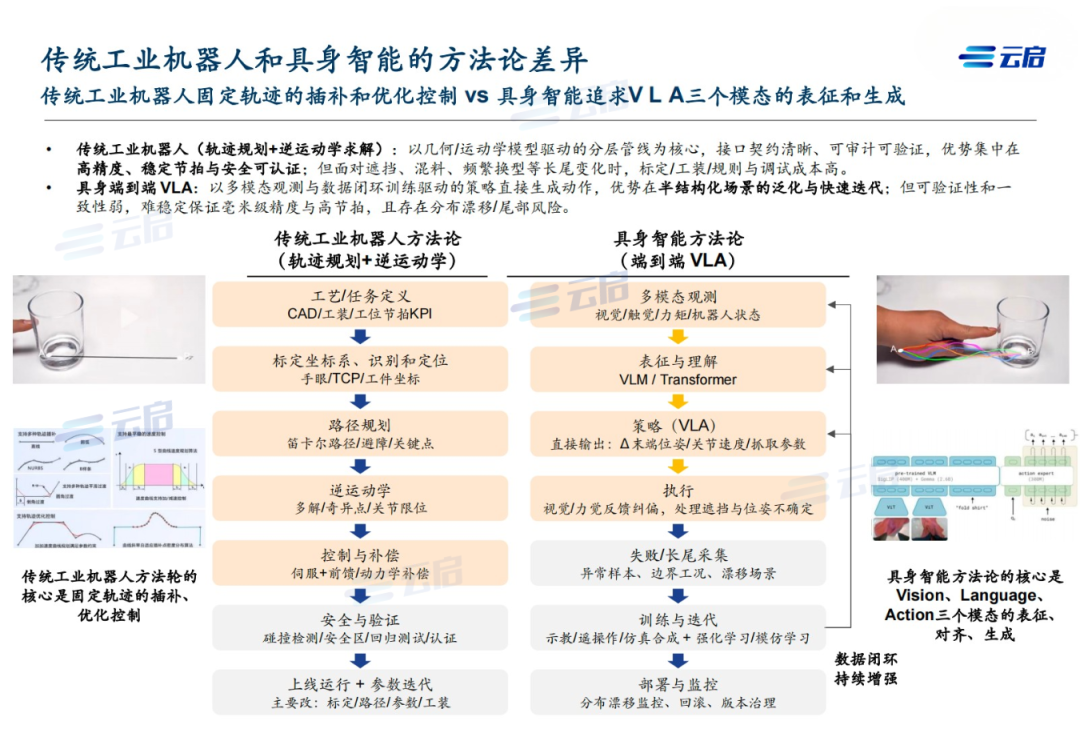
The core of the embodied end-to-end VLA methodology is representation learning from multimodal data. Policies driven by multimodal observation and data-closed-loop training directly generate actions, with strengths in generalization for semi-structured scenarios and rapid iteration; but verifiability and consistency are weak, making it difficult to stably guarantee millimeter-level precision and high cycle times, with distribution drift and tail risks.
Technical Assessment: VLA Capabilities
Are Improving, But Boundaries Are Clear
From an industrial perspective, embodied intelligence is not a simple replacement for existing industrial robot systems, but more like an attempt to expand the capability structure. This naturally means its deployment in industry and logistics is constrained by cycle time, precision, and reliability together.
1. The Incremental Value Brought by VLA Technology
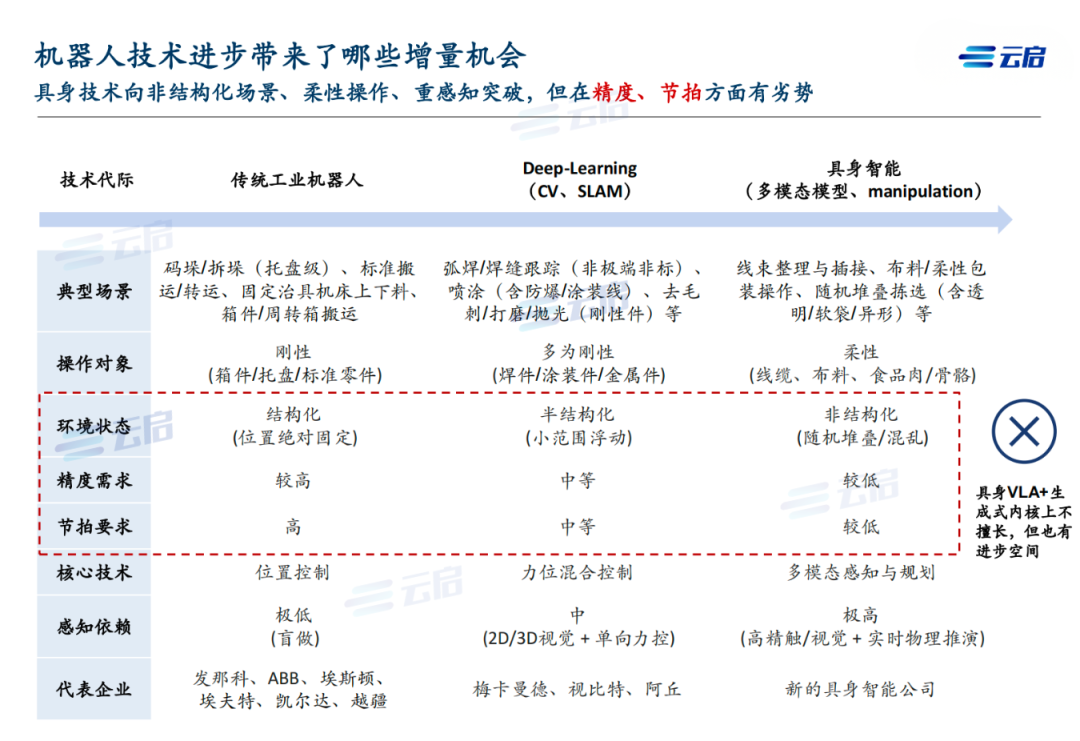
Advances in robotics technology have changed the range of scenarios that can be automated. From traditional industrial robots, to the introduction of deep learning, to the emergence of the embodied intelligence paradigm, incremental gains are mainly reflected in the following areas:
First, automation is beginning to cover unstructured scenarios. Traditional industrial robots rely on highly structured environments, while embodied technology's improved perception and decision-making capabilities enable robots to operate in scenarios with positional variation, occlusion, mixed materials, and random stacking.**
Second, manipulation objects have expanded from rigid parts to flexible and multi-form objects. Embodied intelligence specifically addresses processing capabilities for cables, fabrics, flexible packaging, food, and irregularly shaped objects. Such objects are difficult to manipulate stably through fixed trajectories and parametric modeling; multimodal perception and policy learning significantly broaden the range of automatable objects.**
Third, engineering configuration barriers have decreased somewhat. As perception, understanding, and action generation become deeply coupled, robots become less dependent on tooling, fixtures, and high-precision calibration. In scenarios with frequent SKU changes and rapidly shifting conditions, some automation solutions that were previously too costly to engineer are beginning to become feasible.**
But it must be clear that this incremental value has distinct boundaries. Current embodied technology remains significantly weaker than traditional industrial robots in precision, cycle time, and long-term stability, and cannot replace high-speed, high-precision core manufacturing processes.
In many manufacturing scenarios, traditional industrial robots can achieve 80–150 cycles per minute, while current end-to-end execution speeds under VLA frameworks generally remain in the 10–15 cycles per minute range. At the precision level, requirements for sub-millimeter or even micron-level accuracy in industries like semiconductors exceed the stable output capabilities of current embodied models.
Why General Manipulation
Is Not Suited for Industrial Scenarios
** In embodied intelligence discussions, General Manipulation is often seen as the ultimate goal, but from the practical needs of industrial and logistics scenarios, we believe general-purpose manipulation models do not naturally align with the value orientation of industrial scenarios.
First, industrial scenarios themselves are finite and bounded. Task objectives are clear, and work objects and interaction environments are relatively stable. Under these conditions, large-scale generalization capability is not a hard requirement. On the contrary, the high complexity, multimodal inputs, and inference costs introduced by general-purpose models may reduce system stability and increase verification difficulty. For industrial systems, controllability and determinism take priority over generality.
Second, in industrial environments with extremely high real-time and reliability requirements, domain-specific models refined through reinforcement learning or post-training often have the advantage. These models concentrate computational resources on key skills, making it easier to meet millisecond-level response requirements and long-term stable operation, while also offering more controllable cost structures. Hierarchical architectures and skill atomization remain effective engineering solutions in industrial systems.
Third, from a deployment path perspective, the more reasonable form of VLA in industrial scenarios is not a single monolithic model, but multiple small models coordinated for specific scenarios. Different industrial scenarios differ dramatically, and data is difficult to share; forcibly unified training significantly raises data and verification costs, and also hinders rapid deployment.
A Better Architecture: Domain-Specific Manipulation Models
Under an Agent Architecture with Multimodal Perception
In current practice, a more viable technical form is gradually becoming clear: using an Agent architecture to carry complex task understanding and scheduling, and selecting domain-specific models for the execution layer for specific operations — whether classical robot motion control algorithms or smaller-parameter VLA algorithms refined through post-training or reinforcement learning, depending on the complexity of the required skill.
The advantage of this split architecture is that it: satisfies industrial requirements for real-time performance and stability; controls costs and verification complexity; allows capabilities to be gradually released in specific processes; and from an engineering perspective, represents a more "industry-friendly" approach to introducing intelligence.
Data and Training:
Key Constraints on Embodied Technology's Industrial Deployment
Whether embodied intelligence can truly land in industrial and logistics scenarios depends not only on model capabilities, but more fundamentally on data types, collection methods, and training paths. At this stage, data and training strategies are becoming the most critical constraint variables in embodied technology's industrialization process.
Industrial Data Has Clear Layering
Rather Than a Single Optimal Solution
** Unlike general model training, data in industrial scenarios does not pursue "the more general the better," but exhibits a highly layered structure:
- Real-machine teleoperation data
Obtained through direct human control of real robots, with high precision and strong physical consistency, this is currently the most recognized data form in industrial scenarios, suitable for tasks with strong contact and high precision requirements. But collection costs are high and scale expansion is limited.
- UMI / multimodal human demonstration data
Human operations collected in real environments, then mapped to robot execution space, achieving a certain balance between data quality and scale, with potential as an intermediate form, but still facing engineering adaptation and generalization challenges.
- Motion capture data
Can efficiently generate high-DOF action sequences, useful for supplementing action distributions and guiding learning, but still requires additional modeling and alignment between this and real robot execution.
- Simulation data
Has scale advantages and is an important source for pre-training and reinforcement learning, but used alone is difficult to cover complex uncertainties in the real physical world.
- Internet video data
The vast quantities of video accumulated on the internet potentially reflect physical world patterns, with enormous existing stock, but poor data precision. How to fully extract and compress the physical intelligence behind this stock of video data based on models remains an important direction still being explored at the research frontier.
There is no "universal data source" for industrial embodied training; different stages and different tasks correspond to different data combinations.
Real Data Still Determines Industrial Performance Ceiling
Despite simulation's important role in embodied research, in industrial environments, real data remains the foundation for performance and stability.
Current industrial simulation has made significant progress at the optical and geometric levels, but still shows clear gaps in the following key physical dimensions:
- Uncertainty in contact forces and friction
- Continuous deformation of flexible objects
- Combinatorial complexity from multi-object interaction
- Differences in robot body dynamics
This means simulation is better suited as an amplification tool for training and verification, rather than a replacement path for real data.
A Training Paradigm Worth Attention:
Real2Sim2Real
** From an industrial deployment perspective, embodied training also faces a series of practical constraints: low efficiency and high cost of real-machine teleoperation collection; difficulty in directly reusing data across different production lines and equipment; and limited tolerance in factory environments for trial-and-error and failure samples.
A more viable path is gradually becoming clear in industrial practice, namely the Real2Sim2Real closed-loop process: starting with a small amount of real-scenario and real-operation data; through 3D reconstruction and scene abstraction, mapping real environments into simulation systems; conducting imitation learning and reinforcement learning expansion in simulation; improving policy coverage and robustness; returning to real environments for verification and correction, supplementing key failure samples
**The core value of this paradigm is: using limited high-quality real data to leverage larger-scale training space, while controlling deployment costs and risks.

Analysis of Embodied Application Deployment in Manufacturing Scenarios
**From the perspective of real manufacturing needs, embodied technology applications show significant differentiation across scenarios: some scenarios already have direct deployment conditions, while others are in a transitional optimization phase. Selected scenarios are analyzed below.
Inspection:
A Priority Scenario Where Embodied Technology Can Be Directly Applied
Inspection is currently one of the most practically feasible entry points for embodied technology in manufacturing.
Its common characteristics are:
- Clear task objectives, but highly unstructured operational details
- Large scenario variation, difficult for traditional rule-based algorithms to cover
- Not demanding in continuous high-precision operation, but emphasizing generalization and safety
Embodied solutions have clear advantages in multiple typical scenarios:
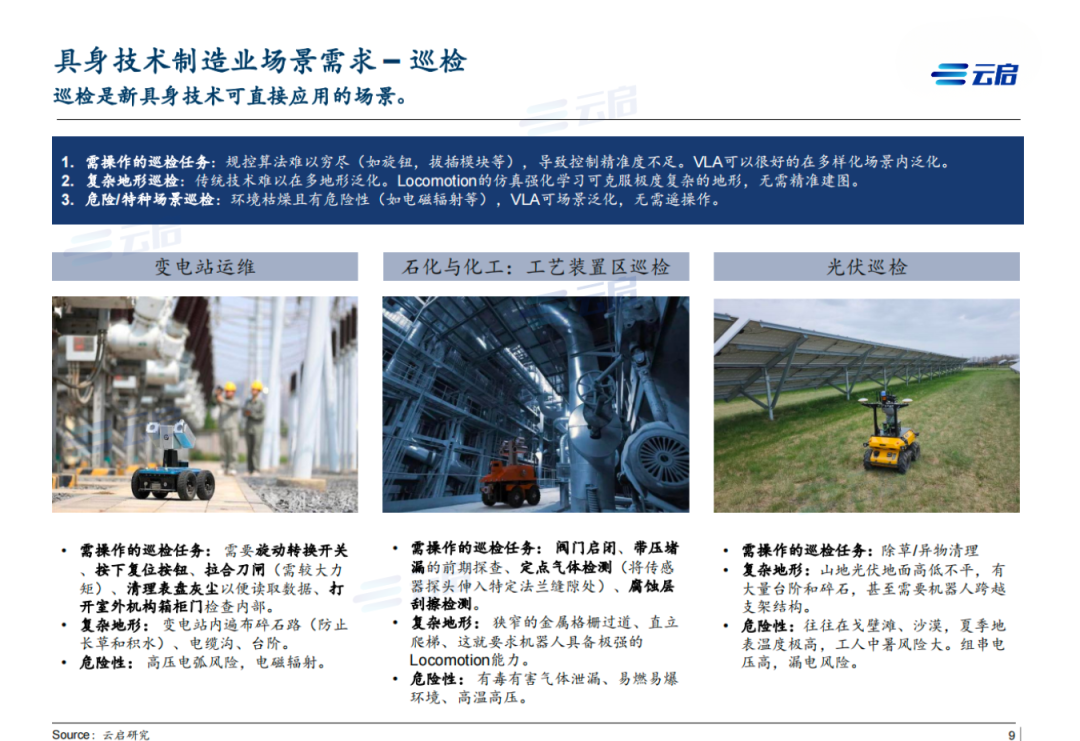
- Substation operations and inspection
Involves equipment status checks, simple operations, and switch resets; environments include complex terrain like gravel roads, cable trenches, and steps, accompanied by high-voltage and electromagnetic risks, suitable for embodied systems to reduce human exposure.
- Petrochemical and chemical plant area inspection
Dense pipe racks, narrow passages, presence of toxic and harmful gas leaks and high-temperature high-pressure environments; inspection tasks emphasize continuous movement and multi-point detection, with high requirements for locomotion and scenario generalization capability.
- Photovoltaic inspection
Large scenario scale, obvious terrain起伏, and often under conditions of high temperature and sand and dust; embodied systems can replace humans in completing inspection and simple cleaning operations.
**Overall, the value of inspection scenarios lies in: controllable operational difficulty, but complex scenario variation, very suitable for embodied system capabilities to shine.
Material Handling:
The Most Scalable Direction in the Near Term
Material handling is one of the largest-volume applications in manufacturing, and also one of the most promising directions for embodied technology in the near term.
Embodied technology has clear room for improvement in the following needs:
- Random bin picking: Facing irregularly stacked materials, traditional planning algorithms struggle, with high requirements for perception and generalization.
- Flexible handling: Facing flexible objects like fabrics, films, and packaging materials, rule-based methods rely on suction cups with limited adaptability.
- Multi-SKU rapid switching: Production lines frequently change material specifications, requiring systems to adapt quickly rather than reconstruct rules.
Performance differences across typical industries are also quite obvious:
- Automotive manufacturing leans more toward in-plant logistics and semi-structured handling
- 3C electronics emphasizes SKU variability and cycle-time sensitivity
- Logistics and e-commerce scenarios have stronger demand for non-standard and irregular item processing
Therefore, material handling becomes a key scenario where both embodied replacement and optimization opportunities coexist.

Precision Assembly:
The Highest Bar for Model Capability and System Maturity
Compared to inspection and handling, precision assembly poses the highest threshold for embodied systems.
Current main challenges concentrate in:
- Flexible deformation object assembly
Such as wiring harnesses, foam pads, and fabrics, where object morphology changes in real time under force, with extremely high requirements for perception and control.
- High-precision concealed assembly
Visual occlusion, tiny tolerances, and complex insertion paths make it difficult for vision-only approaches to meet stability requirements.
- Non-standard final-process automation
Traditional solutions have high customization costs, while embodied solutions still need to further improve process understanding and anomaly handling capabilities.
From the current stage, improvement in precision assembly capabilities depends on continued advances in VLA Pretrain, and in the near term is more suitable for gradual penetration starting from semi-automatic and assisted execution forms.

Manufacturing Scenario Summary:
Capability Boundaries Determine Deployment Pace
From the overall manufacturing application structure, current embodied technology is better suited to prioritize entry into the following directions:
- Scenarios that are complex but have relatively controllable precision and timing requirements
- Scenarios involving flexible manipulation
- Operations under complex geographical environments and complex work procedures
Structurally Advancing Industrial Embodied Intelligence
Synthesizing technical paths, data constraints, and real manufacturing needs, embodied intelligence's deployment in industry is more like a structural evolution rather than a leap triggered by single-point technological breakthrough.
On one hand, VLA, reinforcement learning, and multimodal perception are significantly expanding robots' capability boundaries in unstructured scenarios, creating clear and feasible deployment windows for inspection, handling, and other links; on the other hand, industrial environments' requirements for stability, cycle time, and reliability also mean embodied technology is unlikely to rapidly and comprehensively replace existing systems in a "general model" form in the near term.
From a practical path perspective, organizing system complexity through Agent architecture, carrying execution capabilities through domain-specific manipulation models, and combining with Real2Sim2Real data closed loops is becoming a choice more aligned with industrial reality. This path does not pursue one-time generalization, but gradually expands capability scope through scenario-by-scenario advancement under controllable costs and risks.
Therefore, we are more inclined to understand industrial embodied intelligence as a long-term evolutionary engineering problem: it will not overturn all existing production methods, but has the potential to continuously release incremental value in specific scenarios, and form complementarity with traditional industrial robots and automation systems.