LiDAR or cameras? How we see the autonomous driving route debate

This Industry, Which Elon Musk Has Doubted, Keeps Advancing Amid Skepticism and Support
In the first half of 2024, the penetration rate of LiDAR in China's new energy vehicles hovered around 10–13%. In other words, roughly one out of every ten new energy vehicles was equipped with LiDAR. For cars, LiDAR functions like a vision system with its own flashlight, capable of directly measuring the distance between the vehicle and obstacles.
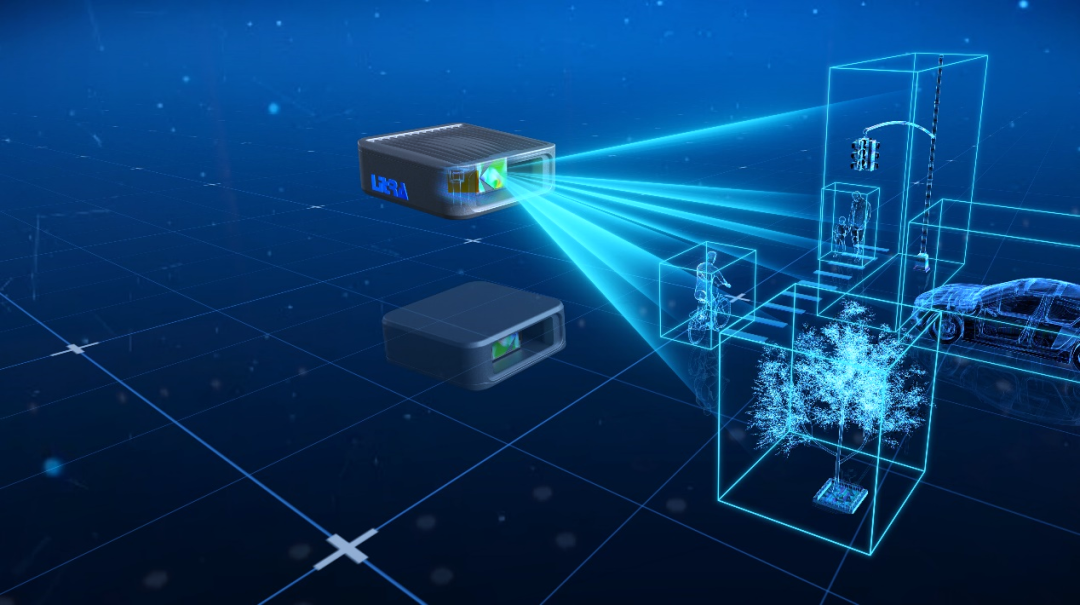 ▲ LiDAR can simultaneously capture grayscale and distance information.
▲ LiDAR can simultaneously capture grayscale and distance information.
Image source: Leishen Intelligence
But controversy has never been far from LiDAR. Elon Musk once said: "Only fools use LiDAR." Meanwhile, a founder of a Chinese EV startup countered: "Anyone who says LiDAR is useless is either stupid or malicious. Tesla isn't right about everything."
From these starkly opposing stances, we can glimpse two fundamentally different paths in autonomous driving development: the vision-only approach represented by Tesla, which relies primarily on cameras plus AI to gather road information; and multi-sensor fusion, which installs cameras, LiDAR, millimeter-wave radar, and other sensors on the vehicle.
So what exactly is LiDAR — the technology Musk voted against — and what role can it play?
Recently, we invited Dr. Zhongxiang Zhang, founder and CEO of Shenzhen-based Leishen Intelligence and a veteran of the LiDAR industry, to join FreeS Fund partner Yongcheng Yang for an in-depth conversation on the challenges and opportunities along the road to mature autonomous driving technology.
Zhang has spent nearly a decade in LiDAR R&D and is an expert in optoelectronic systems and integrated optics. In his view, the past ten years represent "not just the history of Chinese automotive intelligence, but also the history of domestic cars' remarkable comeback."
Their discussion covered:
- How do accidents related to intelligent driving occur?
- How did intelligent driving evolve to where it is today? And which scenario presents the greatest difficulty for autonomous driving?
- How should we view the technical challenges and commercial prospects of autonomous driving?
- Does the evolution of machines or the path of technological progress necessarily need to imitate humans?
- LiDAR or cameras? How should we understand the route debate in autonomous driving?
- In a fiercely competitive auto market, how can LiDAR increase its penetration rate and shift from an optional feature to a must-have for automakers?
- What impact will Trump's presidency have on the LiDAR industry? Where do future market opportunities lie?
Reader Giveaway
What are your thoughts on autonomous driving and LiDAR? Share them in the comments. We'll randomly select 5 readers to each receive a FreeS Fund industry research handbook.

/ 01 / China's Intelligent Driving Decade: A Sweeping Comeback
Yongcheng Yang: Autonomous driving and new energy vehicles are long-term focus areas for FreeS Fund. We've invested in various sensor projects related to autonomous driving, including millimeter-wave radar, LiDAR, and associated chips. Dr. Zhang, how did you end up dedicating yourself to LiDAR?
Zhongxiang Zhang: I've been working on LiDAR R&D for nearly ten years. My undergraduate thesis focused on single-photon sources and detectors for quantum cryptography systems — actually quite close to my current LiDAR work. During college, I also got the opportunity to visit National Tsing Hua University in Taiwan, where I first encountered frontier physics like laser-accelerated electrons and nonlinear optics. It made a deep impression on me, so when applying for PhD programs, I went straight for electrical engineering.
After completing my doctorate, I worked in Hong Kong for over three years. Finding the work too dull, I started thinking about entrepreneurship. At that time, Shenzhen had just launched its "Peacock Plan" to attract talent, which drew me back to start a company there. In 2013, I registered Leishen Intelligence. Initially, I had no plans to raise funding — instead, we sustained the company by taking on projects, accumulating over 2 million yuan in total project revenue.
We started with Raman LiDAR for glass inspection. After moving into an incubator space for returnee entrepreneurs, I noticed numerous service robot companies on the floors above and below us, almost all needing ranging radars. We decisively pivoted to ranging LiDAR.
From 2016 to 2017, the automotive LiDAR market began heating up, and we decided to lock our R&D direction onto pure solid-state optical phased array LiDAR.
Pure solid-state optical phased array LiDAR is a 3D ranging system based on solid-state beam steering. Its core modules include a ranging module and a scanning imaging module. The ranging module works primarily by having a laser transmitter emit laser pulses; after reflecting off target objects, the return signals are collected by the receiver, enabling distance calculation. Ranging technology is already quite mature today, and most LiDAR team innovations center on how to achieve high-speed 3D imaging. The optical phased array chip essentially serves as an efficient scanning engine that bridges from single-point ranging to 3D imaging.
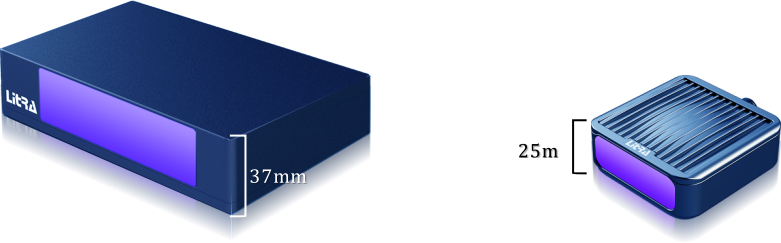
▲ Electrically scanned solid-state LiDAR prototype and imagined mass-production unit.
Image source: Leishen Intelligence
Yongcheng Yang: Dr. Zhang is an interdisciplinary entrepreneur with backgrounds in both optics and electronics, and his current venture sits precisely at the intersection of these two fields. This kind of interdisciplinary cross-pollination capability is something FreeS Fund highly values when selecting and investing in projects.
Leishen's products are closely tied to the autonomous driving supply chain. Could you share your views on the new energy vehicle and autonomous driving industries?
Zhongxiang Zhang: China's new energy vehicle development over the past decade can genuinely be described as "sweeping and magnificent." This represents not just the history of Chinese automotive intelligence, but also the history of domestic cars' remarkable comeback. The shift from gasoline to battery powertrains is only one aspect; the truly profound impact comes from the development of automotive intelligence.
Let me briefly describe the industry's current state with four data points, sourced from the China Association of Automobile Manufacturers and the China Automobile Dealers Association. The first figure is 67.6% — the market share of domestic brands in China this September. The second is 46.3%, representing new energy vehicles' share of the overall market in September. The third is roughly 13%, the LiDAR penetration rate in new energy vehicles in the first half of this year.
These figures show that whether in terms of new energy vehicle growth speed or domestic brands' market share, performance has far exceeded our expectations from three years ago. And LiDAR, as an important marker of intelligence, has achieved a respectable 13% penetration rate.
However, there's also a rather sobering figure: 4.9%, roughly the profit margin of China's automotive manufacturing industry from January to July this year. This extremely low number reflects the current intensity of industry competition. This pressure naturally transmits down the supply chain, including to us as a LiDAR company. Consequently, cost reduction has been our customers' most urgent demand over the past three years.
Only through technological innovation can costs be reduced while maintaining a healthy supply chain. Most mass-production vehicle autonomous driving systems actually operate under extreme cost constraints, striving to improve algorithm stability, universality, and safety.
Thus, the history of autonomous driving development over the past decade can be roughly divided into two phases: 2016 to 2020 was dominated by unmanned driving, exemplified by projects like Baidu Apollo, with capital focused on driverless technology; after 2020, mass-production vehicles took center stage, and high-level assisted driving and autonomous driving have become part of everyday life.
/ 02 / How Do Accidents Related to Autonomous Driving Occur?
Yongcheng Yang: With the rise of artificial intelligence, exploration of autonomous driving has deepened. From Tesla to domestic EV startups, assisted driving and even higher-level autonomous driving features have gradually entered the market. For instance, Robotaxi autonomous taxis are already being deployed in service industries. Autonomous driving seems no longer a distant dream but a technology within reach.
Yet negative news about autonomous driving also surfaces from time to time. For example, there was recently an incident where an autonomous vehicle failed to recognize water-filled barriers on a highway and collided with them. How do you view these accidents and the future of the autonomous driving industry?

▲ A pedestrian walkway demarcated by water-filled traffic barriers. Image source: Wikipedia @WATA5
Zhongxiang Zhang: As I mentioned, autonomous driving has made tremendous progress over the past decade, but large-scale deployment in mass-production vehicles has only happened in the last three years. At this stage we call it assisted driving, but it has actually surpassed traditional L2 assistance, closer to "L2+" or "L2++" levels — not yet L3, but not far off.
Technological development always involves trial and error, inevitably with twists and turns, and sometimes painful costs. This is common to countless technological innovations throughout history. Autonomous driving is no exception. The public will necessarily go through a process: from skepticism, to early adoption, to cautious experimentation, and finally gradual widespread acceptance. Throughout this process, understanding ascends in a spiral.
Regarding autonomous driving accidents, like the water barrier incident you mentioned, similar cases have occurred numerous times. According to some public information, since 2021, the U.S. National Highway Traffic Safety Administration (NHTSA) has investigated over a thousand Tesla Autopilot-related accidents. Although these reports were not fully disclosed due to data privacy concerns, The Wall Street Journal published a report this July analyzing accident details from federal documents and local police records, covering over a thousand incidents with 222 relatively detailed accident records.
According to the report, 44 involved sudden Autopilot steering, and 31 resulted from failure to recognize obstacles and colliding directly — similar to the water barrier scenario. Additionally, the report disclosed 12 crash videos, of which 8 occurred at night and 2 in dim twilight conditions.
This aligns with our understanding: cameras, as passive sensors, can misjudge in low-light environments. Therefore, multi-sensor fusion should be the inevitable direction for future technological iteration.
Yang Yongcheng: I specifically watched the video of the autonomous driving accident you just mentioned. It happened on a highway with relatively simple road conditions. Construction workers had placed a row of water-filled barriers hundreds of meters ahead to block the lane. In this situation, the vehicle should have switched to the adjacent lane to avoid hitting the barriers. But the video showed the vehicle didn't slow down and crashed straight into them. Fortunately, it didn't cause a serious accident.
Visibility was good and the road conditions were simple—so why did the vehicle still crash? Even with a pure vision system, it should have at least seen the obstacle and taken deceleration action. From a technical standpoint, was this due to camera limitations or a problem with the intelligent driving algorithm?
Zhang Zhongxiang: I'm not an expert in autonomous driving algorithms, but from a logical perspective, I suspect this accident may have occurred because the vehicle's sensors or algorithm failed to recognize the obstacle. Otherwise, it should have triggered braking action.
We typically have an intuitive understanding that when a camera sees an obstacle, the autonomous driving system will take action—braking or steering, for instance. However, the currently prevalent pure vision intelligent driving approach usually passes camera data to an AI module, which then outputs specific information about obstacles, such as their type, size, and distance.
The AI module's ability to identify obstacle information depends on whether sufficient data has been collected and trained for that type of obstacle. If the AI model lacks adequate data, it may fail to recognize the obstacle—effectively becoming "blind" to it.
Yang Yongcheng: I understand—this relates to AI data accumulation. So autonomous driving companies are all extensively collecting data, accumulating driving hours and road condition information, to enable the system to better identify objects on the road. Is that correct?
Zhang Zhongxiang: Yes. After the system identifies an object, it needs to judge its volume through prior training and map it into a digital world model. This distance judgment is similar to our everyday experience—for instance, inferring how far away something is based on its size in the frame.
Yang Yongcheng: You're saying the system judges distance through object size in the image. Is this similar to how our human eyes use the "far small, near large" logic?
Zhang Zhongxiang: Exactly.
Yang Yongcheng: Then the system needs an empirical value to assist judgment—it must first "know" what the object is. For example, it needs to know a person's approximate height to judge distance based on their size in the image.
Zhang Zhongxiang: Yes. In Elon Musk's thinking, he believes human neural networks and silicon-based neural networks are fundamentally similar, so he wants vehicles to be able to drive like humans.
Yang Yongcheng: So the system needs to "recognize" these target objects in advance through collection and training. This reminds me of a similar accident where a vehicle overturned on a highway with its chassis facing oncoming traffic. The following vehicle's system hadn't been trained on chassis data, so it couldn't recognize it as a vehicle, leading to a collision.
However, I'm still somewhat puzzled. Something like a water-filled barrier is very common on highways—it's standard equipment for construction workers. Theoretically, the AI model should be able to recognize it. Why did the vehicle still crash into the barrier stack?
Zhang Zhongxiang: Actually, there's a huge difference between a single barrier and a stack of them. Barriers come in different colors, and their arrangements vary enormously. The people placing them don't consider whether the vehicle system has been trained on their particular configuration.
Furthermore, under different lighting conditions and surrounding backgrounds, barriers might be recognized as different obstacles. So even combinations of barriers can theoretically present infinite variations.
On highways it's relatively standardized, but on urban roads, in alleys, residential areas, and similar places, roadside items and their combinations are virtually endless. More importantly, in end-to-end AI black boxes, we cannot manually label specific scenarios to improve recognition accuracy. This is also a limitation of end-to-end models.
Yang Yongcheng: People might assume that as AI models accumulate data, autonomous driving systems should be able to recognize all common items. But from what you're saying, this may not be fully achievable in the short term.
Based on your explanation, when an AI model performs object segmentation, it sometimes may not correctly separate connected objects. For example, with barrier combinations arranged in various shapes, it might treat these barriers as a single whole. Is that right?
Zhang Zhongxiang: Yes.
Yang Yongcheng: So while individual object types are theoretically finite, their combinations are infinite. In that case, object combinations on highways are relatively simple, while on urban roads—for instance, in alleys or residential areas—the combinations are more complex and challenging. Is that correct?
Zhang Zhongxiang: Yes, which is why urban NOA (Navigate on Autopilot) is much harder to implement than highway NOA.
Yang Yongcheng: It seems autonomous driving is still quite far off. What do you think?
Zhang Zhongxiang: I don't think we need to worry too much—technology is actually advancing rapidly. Even with pure vision solutions, we've seen that Tesla's iteration speed is very fast, and AI and intelligent driving algorithms are improving. Beyond pure vision, there are better technical approaches, such as multi-sensor fusion combining millimeter-wave radar and LiDAR.
Currently, millimeter-wave radar is already deployed at scale in mass-produced vehicles, and high-end models basically all come equipped with LiDAR. Meanwhile, Robotaxi autonomous taxis are already operating on roads, equipped with multiple LiDAR units.
LiDAR or Cameras? The Autonomous Driving Route Debate
Yang Yongcheng: In fact, there are two major technical schools in this industry. One is Tesla's pure vision school, which primarily relies on cameras to obtain road condition information. The other is the multi-sensor fusion school, which uses cameras, LiDAR, millimeter-wave radar, and other sensors. Is this understanding correct?
Zhang Zhongxiang: Yes, the three mainstream sensor types currently are cameras, millimeter-wave radar, and LiDAR.
Yang Yongcheng: What's the relationship between LiDAR and millimeter-wave radar? Are they competitive, substitutive, or something else?
Zhang Zhongxiang: Let me give the conclusion first: they are complementary, and fusion is the optimal solution. I'm on the multi-sensor fusion side. LiDAR and millimeter-wave radar are not in a substitution relationship, nor are they with cameras. The best approach is to fuse them while keeping costs controllable.
Millimeter-wave's greatest advantage is resistance to severe weather, but its imaging capability is weaker. Even higher-grade 4D millimeter-wave radar cannot compare with LiDAR in imaging. They play different roles in autonomous driving systems. Let's compare their strengths and weaknesses.
4D millimeter-wave radar has been quite hot since last year—Tesla popularized this technology. 4D millimeter-wave radar has certain 3D imaging capabilities, priced around 1,000–1,800 RMB. Compared to current LiDAR, it still has some cost advantage, but it's considerably more expensive than ordinary millimeter-wave radar.
However, in performance, the gap between 4D millimeter-wave radar and LiDAR is very large. Take ranging accuracy as a metric: 4D millimeter-wave radar has ranging accuracy of about several tens of centimeters, while LiDAR is typically 2 centimeters.
As LiDAR costs decrease further and product form factors gradually become solid-state, 4D millimeter-wave's advantages will diminish. Its main remaining advantage will be resistance to severe weather. So we believe the best solution is fusion—using millimeter-wave radar and LiDAR together to ensure the safety and stability of autonomous driving systems.
Yang Yongcheng: You mentioned that millimeter-wave radar's resolution is much lower than LiDAR's. Is this due to design reasons or physical limitations?
Zhang Zhongxiang: This is due to physical limitations. Every imaging method has physical limits, determined by the wavelength of electromagnetic waves used for imaging. Millimeter-wave wavelengths are on the millimeter scale, while LiDAR wavelengths are on the micrometer scale (1 micrometer equals one millionth of a meter)—a difference of 3 orders of magnitude. This注定 [is destined to mean] millimeter-wave radar's resolution cannot compare with LiDAR's.
A typical millimeter-wave radar outputs about 30,000 points per second, while LiDAR can output over 1 million points per second. This creates a large gap in spatial resolution between the two.
LiDAR's advantage can be summarized in one sentence: it is currently the most efficient and precise 3D imaging tool that humans have mastered. Compared to cameras, LiDAR has two characteristics at the physical level: First, LiDAR is an active sensor—it can emit light autonomously; while cameras are passive sensors that rely on ambient light for imaging. This difference ensures LiDAR can operate normally in any lighting environment.
Yang Yongcheng: Active and passive sensors—what do these concepts specifically mean? What are their respective advantages?
Zhang Zhongxiang: Active sensors, also called active sensors, can emit light themselves—for example, LiDAR emits light and receives its own emitted light. Passive sensors, like cameras, rely on ambient light for imaging, so the quality of ambient light affects their imaging quality.
Yang Yongcheng: LiDAR is like a vision system carrying a flashlight, and this "flashlight" is laser—the best light source we currently know of.
Zhang Zhongxiang: Yes, that analogy is very precise.
Yang Yongcheng: So because LiDAR has a stable light source, its receiver can maintain data accuracy to the greatest extent, with minimal influence from external environmental lighting.
You also mentioned 3D sensors earlier. What's the difference between LiDAR's 3D sensing and camera sensing?
Zhang Zhongxiang: This is exactly the second point of difference. LiDAR outputs 3D point cloud information, while cameras output RGB planar information—what we commonly call 2D information.
A point cloud is a 3D spatial data representation, typically composed of numerous points, with each point representing coordinates (such as x, y, z) of a position in space. Point clouds have wide applications in many fields, particularly in 3D scanning, computer vision, LiDAR measurement, virtual reality (VR), augmented reality (AR), and other technologies.
In autonomous driving algorithms, camera output information is converted into a 3D model. For example, Tesla announced Occupancy Network at its 2022 AI Day—a deep learning method used in Tesla's autonomous driving. The principle is identifying objects through cameras, estimating their position probability in 3D space, thereby reconstructing the real environment to support decision-making. LiDAR, however, directly outputs 3D point cloud models without needing this conversion step.
Whether it emits light and the form of output information are the fundamental physical differences between LiDAR and cameras. This also determines that they are not in a competitive relationship but a complementary one. Particularly in L3 and above autonomous driving systems, LiDAR is an indispensable sensor. Multi-sensor fusion is likely safer than cameras alone.
Yang Yongcheng: You mentioned that LiDAR can provide an additional dimension of data. Is this additional data the distance information? That is, LiDAR can directly measure obstacle distance without needing to infer it through life experience like humans or data accumulation like AI models. Is that correct?
Zhang Zhongxiang: Yes.
▲ LiDAR can simultaneously obtain grayscale and distance information. Image source: Licheng Technology
Yang Yongcheng: That explanation makes it very clear. However, Elon Musk once said "only fools use LiDAR," and as you mentioned, humans drive with their eyes — that's an intuitive logic. So while high-end vehicles come equipped with LiDAR, many mid-range and entry-level cars still rely on pure vision systems. Is it possible that pure vision systems will succeed in the future, making LiDAR unnecessary?
Zhang Zhongxiang: But there are also people who say, "not using LiDAR makes you either stupid or malicious." Actually, Musk also described LiDAR as an "attractive local maximum." He explained that road systems are designed based on the human nervous and visual systems, so a general-purpose autonomous driving solution should be built on silicon-based neural networks and cameras.
What Musk meant by "local maximum" is that LiDAR gathers information from sensors mounted on the vehicle itself to make decisions locally. That concept is quite precise. If cost weren't a factor in future high-level autonomous driving architectures, who would abandon such a local maximum? LiDAR directly outputs 3D point clouds, while cameras require extensive data training to achieve 3D reconstruction — different paths leading to the same destination, ultimately both enabling machines to understand the physical world and make driving decisions.
But from a commercialization perspective, LiDAR used to be prohibitively expensive, and Tesla started early with no other option but to choose the camera-based approach. As AI and computing power improve, vision-based autonomous driving algorithms become more robust, which is why Musk sees pure vision as the "global maximum" that transcends the local maximum.
Pure vision solutions require cloud support. When deploying in different countries, independent cloud computing centers need to be built, and multi-camera video data must be compressed before upload, which demands higher local computing power. So comparing LiDAR and pure vision: the former has visible hardware costs, while the latter has hidden costs — Tesla FSD's high subscription fee reflects this.
There's another point: even setting aside full autonomous driving, LiDAR can significantly improve automatic emergency braking recognition rates in assisted driving systems. The floor value of LiDAR is as safety redundancy; the ceiling is high-level autonomous driving systems.
The value of LiDAR is obvious. Whether to use it or not is more of a business consideration rather than a technical necessity.
Yang Yongcheng: Overall, there are two autonomous driving technical routes: one based on pure vision plus AI, the other on multi-sensor fusion where LiDAR directly obtains 3D data including distance and velocity information, enabling intelligent driving even with relatively simple algorithms.
However, these two approaches aren't actually contradictory — they can integrate with each other. This reminds me of the history of medicine. Early medicine had no modern X-rays or ultrasounds; traditional Chinese medicine relied mainly on "observation, auscultation, inquiry, and palpation" to accumulate experience. Compared with young TCM practitioners, veteran doctors have accumulated more "big data," making their diagnoses more accurate. Modern medicine, meanwhile, uses ultrasounds and biochemical tests for diagnosis. LiDAR and vision systems are somewhat analogous to these "direct measurement tools" — they can determine object information without big data training, correct?
Zhang Zhongxiang: Correct. And in autonomous driving, people's expectations for cars far exceed human driving standards, so autonomous driving systems need not only to match human driving capability but to surpass it.
Yang Yongcheng: Does this also imply that the evolution of machines or the path of technological progress doesn't necessarily need to imitate humans? For example, the most efficient transportation vehicles are four-wheeled cars, trains, and airplanes — but they don't rely on human legs. In other words, technological progress doesn't have to follow the route of human evolution, and human standards aren't necessarily optimal, right?
Zhang Zhongxiang: Yes.
Autonomous Driving: Where Is It Hardest to Drive?
Yang Yongcheng: From what I understand, Robotaxi sensors, including LiDAR, are more numerous than those on ordinary commercial vehicles. Is this related to the complexity of driving on urban roads? For example, taxis might need to drive into hutong alleys and such areas.
Zhang Zhongxiang: Yes.
Yang Yongcheng: From the perspective of autonomous driving difficulty, which scenario do you think is the hardest?
Zhang Zhongxiang: In fact, highway autonomous driving is less difficult than urban autonomous driving. Highway NOA was the first application in autonomous driving algorithms. Looking at the release sequence from automakers in recent years, they typically launched highway autonomous driving first, followed by urban autonomous driving.
The main reason is that while highway driving involves higher speeds, this doesn't significantly impact computing speed and sensor response requirements. Instead, because highway environments are enclosed, road conditions relatively simple, and traffic rules clear, algorithms mature more easily. Urban roads are far more complex, requiring handling of more complicated road environments and pedestrian situations.
There's another high-frequency scenario — parking. Parking appears low-speed, but delivering a good experience is extremely difficult. Currently, most vehicles with automatic parking include reminders in their user manuals that drivers should ensure the surrounding environment is suitable before activating the feature. If there are three-dimensional obstacles like fire hydrants nearby, automatic parking may not function properly. Though parking is slow, it requires monitoring a broad environmental range with high precision demands. So parking algorithm difficulty exceeds urban autonomous driving, which in turn exceeds highway autonomous driving.
Yang Yongcheng: Parking and urban roads are indeed more complex. Is this also related to road conditions? For example, parking spaces are usually very small, especially in China where there might be only 10 to 20 centimeters between parking spots. And urban roads are narrower than highways, so does this place higher demands on sensor precision?
Zhang Zhongxiang: Yes, not just sensor precision — sensors need to cover a broader spatial range as well.
Yang Yongcheng: We've discussed LiDAR at length and basically understand its importance in autonomous driving and the value of the precise data it provides. Yet LiDAR adoption isn't actually very high — not all vehicle models are equipped with LiDAR. Why is this?
Zhang Zhongxiang: Currently, LiDAR adoption in new energy vehicles is approximately 10–13%, meaning roughly one in ten vehicles is equipped with LiDAR. Given current LiDAR prices, this proportion isn't actually low. The models currently carrying LiDAR are mainly priced above 200,000 RMB, while the highest sales volume occurs in the 100,000–200,000 RMB range.
The primary reason for lower adoption is LiDAR cost. Mainstream LiDAR units already in production have dropped from tens of thousands of RMB to several thousand, but even so, for the intensely competitive automotive market, LiDAR remains a very expensive sensor — particularly for vehicles priced below 200,000 RMB and for future high-level autonomous driving where a single vehicle might need three LiDAR units. Cost remains a pain point for the in-vehicle LiDAR industry. Cost reduction is the primary goal of any engineering innovation — this is the core value.
Another issue is LiDAR robustness. LiDAR with moving parts has yet to undergo long-term verification of durability and reliability under automotive operating conditions. As autonomous driving algorithms become more dependent on LiDAR, especially at L3 and L4 levels, reliability requirements will increase. Therefore, cost and reliability are the two main factors currently limiting LiDAR adoption.
The Evolution of LiDAR
Yang Yongcheng: You're working on a phased array LiDAR project. What are the advantages of phased array LiDAR? What progress have you made?
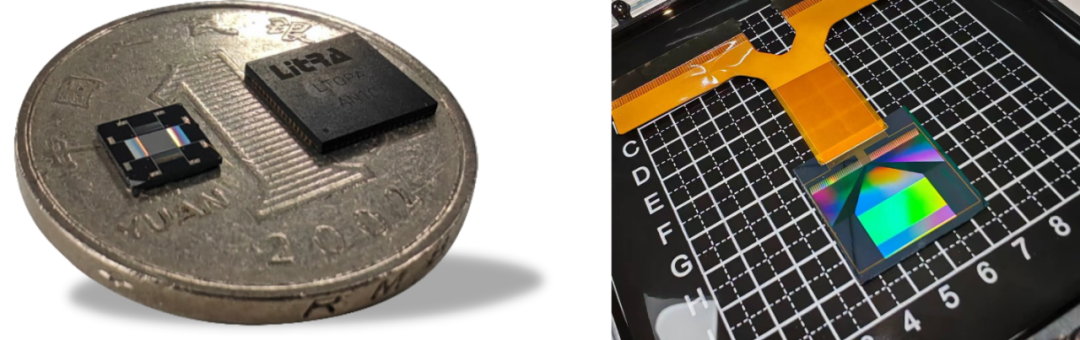
▲ (Left) Small-form-factor OPA chip with driver ASIC; (Right) Large-aperture OPA chip. Image source: Licheng Technology
Zhang Zhongxiang: Phased array LiDAR shares the same fundamental principles as microwave phased arrays. Many people may be more familiar with microwave phased arrays due to military applications. Both work by adjusting phase delay to achieve coherent superposition of electromagnetic waves, thereby changing the direction of wave propagation.
Phased array LiDAR (OPA) chips are solid-state scanning elements that can significantly reduce the number of laser transmission and reception components, simplify optical systems, lower optical assembly difficulty, and thereby substantially reduce cost and product size. At the same time, without mechanical wear, solid-state LiDAR achieves significant improvements in reliability and lifespan. LiDAR will transition from mechanical scanning to electronic scanning.
We at Licheng began OPA chip tape-outs in 2017, undergoing multiple architecture and material system adjustments during chip production. In 2021, we successfully illuminated our first dual-axis scanning OPA chip, becoming the first team internationally to achieve projector effects — presenting 2D dynamic patterns through high-speed scanning of light points. We've also obtained multiple domestic invention patents and three US patents.
After two years of R&D, we finally demonstrated complete unit point cloud effects by the end of 2023. In the first ten months of 2024, we continued increasing OPA chip aperture from the early 500-micron aperture to 3.6mm and 5mm, with 8mm and 14mm aperture chip samples expected soon.

▲ Licheng Technology product matrix. Image source: Licheng Technology
In early 2024, we began engaging automakers with samples. Beyond automotive applications, we're actively advancing non-automotive applications such as consumer robots and industrial forklifts.
Yang Yongcheng: In fact, our microwave radar went through a similar development path — early versions were mechanical, like a large dish that scanned via electric or manual rotation, later evolving into phased arrays. This phased array technology is very prevalent in military and high-end microwave radar; externally it appears as a flat panel with no moving parts. When arranged on warships, Americans call it "Aegis," while we call it "Chinese Aegis."
From a technical perspective, Licheng has achieved optical-domain control technology analogous to microwave beam scanning — this is indeed excellent technology, and I look forward to its rapid development. From a market perspective, where does Licheng stand in the phased array LiDAR track?
Zhang Zhongxiang: We should be internationally leading. Whether it's the scanning effects we demonstrated in 2021 or our current complete unit point cloud demonstrations, we were the first team to showcase these.
Yang Yongcheng: Compared with early expensive overseas LiDAR, Chinese-manufactured LiDAR has indeed made significant contributions. Some industry analysis suggests that the price point for LiDAR popularization is around $100. Do you think $100 LiDAR is achievable?
Zhang Zhongxiang: Entirely achievable.
What Impact Will Trump's Presidency Have on the LiDAR Industry? Where Are Future Market Opportunities?
Yang Yongcheng: The US election recently concluded, and Trump has been elected president again. Do you think Trump's presidency will have any direct impact on the LiDAR industry?
Zhang Zhongxiang: Trump's election is to some extent also Musk's victory, and there may be stronger expectations for FSD entering China. Under China's complex traffic conditions, Tesla is more likely to adopt LiDAR as an auxiliary sensor in the future.
Additionally, in October 2024, news broke about a foreign company illegally obtaining national geospatial data, sparking widespread discussion. Vision-based autonomous driving solutions rely on interaction between local data and the cloud — road and pedestrian data collected by vehicles gets uploaded to companies' private cloud servers. Although the uploaded data takes the form of simplified functions, in China, the likelihood of opening up image data collection and uploading remains low in the near to medium term, and possibly even the long term. LiDAR completes local autonomous driving decisions based on onboard computing power, giving it clear advantages in this environment, and it may become the only viable autonomous driving solution.
Yang Yongcheng: You've been an entrepreneur for many years, and market demand and attention toward LiDAR technology have shifted over time. How has your mindset changed?
Zhang Zhongxiang: We've persisted with OPA for so long, and the most important thing is that we've always believed this could work, and that it would be useful once it did. When we saw the actual point cloud results from our electronically scanned LiDAR demonstration, we validated that our years of conviction were real — because we achieved 200-line performance within a cost structure close to that of a single-line LiDAR. So in terms of technological persistence, our mindset hasn't changed.
However, looking at the broader industry and market environment, the in-vehicle LiDAR market today is quite different from a few years ago. Back then, we mainly focused on R&D and fundamental breakthroughs. Now the greater challenge is engineering iteration speed and commercial capabilities with automakers — that's probably our core focus at this stage.
Yang Yongcheng: How do you view the commercial prospects for autonomous driving? Technically speaking, where has autonomous driving progressed to at this point?
Zhang Zhongxiang: Among companies that started early in autonomous driving, Tesla's FSD (Full Self-Driving) has actually been continuously updating. With each update, we see significant reductions in system disengagements, indicating steady technological progress.
That said, it's also apparent that in certain complex environments, the system still lacks smoothness — passengers feel jolts, requiring human intervention. Tesla represents the cutting edge of autonomous driving technology abroad. Domestically, many teams started slightly later, but have generally adopted multi-sensor fusion configurations for advanced driver assistance, rather than Tesla's pure vision approach.
In recent years, intelligent driving systems represented by Huawei's "Qiankun" system have also advanced rapidly, with significantly improved user experience. Autonomous driving has indeed reduced our driving burden to a certain extent.
As for the current development stage and future evolution speed, I'd use an analogy: anyone who's ridden high-speed rail has experienced this — when standing on the platform watching an approaching train from afar, it seems to move very slowly. But as it gets closer and closer, before you can even react, it has already roared past. New technologies, new trends, and new business models often produce a similar experience. Autonomous driving is the same — I believe that by the time we truly see it clearly, it may already be right upon us. The future is actually not far away.
Reader Giveaway
What are your thoughts on autonomous driving and LiDAR? Share with us in the comments. We'll randomly select 5 readers to each receive a FreeS Fund industry research handbook.

▲ AI for Science: At the Inflection Point of a New Research Paradigm | FreeS Report
▲ From Silicon Valley PC Innovation Since 1980, Viewing the Era of AI Hardware Opportunities
▲ How Can Tech Consumer Brands Go Global?
▲ Is Elon Musk's Prediction Right? Will LiDAR Make It Into Cars? | FreeS Chip Series
▲ "The Higher You Stand, the Farther You See": The Origins and Future of the Satellite Communications Space Race | FreeS Report 34
Star the FreeS Fund WeChat Official Account for timely business insights delivered to your feed
