4 Stanford PhDs Crash Into a Trillion-Yuan Track | Z Circle

Force control is a critical, necessary step toward humanoid robots.
Z Circle is a column about people.
In 2016, ShiQuan Wang and several Stanford alumni founded Flexiv, dedicated to researching and applying the most advanced humanoid robotics and AI technologies. ZhenFund invested in Flexiv's Series A in 2017. Five years later, Flexiv became a unicorn.
ShiQuan Wang, CEO and Chief Product Officer of Flexiv, graduated from Stanford University's Biomimetics and Dexterous Manipulation Laboratory and AI Laboratory. He has published over 20 papers in top international journals and conferences, with more than ten years of robotics R&D experience. From the "Rizon" robotic arm that made waves at the Hannover Messe in Germany in April 2019, to this year's WAIC conference demonstrations of clothes folding and other applications paired with robotic arms, Flexiv has developed world-class capabilities in physical world understanding and human-like operation for general-purpose robotics.
In a recent feature by China Entrepreneur, ShiQuan Wang's journey in founding Flexiv is explored in depth — from choosing a technical direction, focusing on general-purpose robotics R&D, breaking into new markets, to building a commercial flywheel. Below is the original report.

By Zhao Dongshan, reporter at China Entrepreneur
Edited by Li Wei
When you bite into a flaky cod fillet, you probably don't think about the robotic force behind it.
Traditionally, achieving that flaky texture required workers on the processing line to pile cod and breadcrumbs together, then press them into shape with a certain amount of force. To ensure food safety, workers had to wear protective gear and labor in low-temperature environments. Today, a general-purpose robot developed by four Stanford PhDs is transforming this production line. In blind taste tests, robot-produced cod fillets taste better, with higher and more consistent output.
ShiQuan Wang is one of the core founding members of this general-purpose robotics company. As an undergraduate at Zhejiang University, he chose robotics as his focus — seeing it as an interdisciplinary field more likely to spark innovation. After graduating from Zhejiang, he pursued his PhD at Stanford, joining the Biomimetics and Dexterous Manipulation Laboratory, where he accumulated over ten years of robotics R&D experience.
In 2016, ShiQuan Wang and several Stanford alumni founded Flexiv, following a humanoid technology innovation path focused on developing and producing adaptive robots that integrate industrial-grade force control, computer vision, and AI technology, providing general-purpose robotics solutions and services to customers across different industries. The estimated addressable market for applications already identified reaches hundreds of billions of yuan.
Over the past eight years, Flexiv has completed four rounds of financing, with investors including GSR Ventures, Gaorong Capital, ZhenFund, Shunwei Capital, MobiCapital, Yunfeng Capital, and China Merchants Capital, among other well-known institutions. The company has also received continued support from strategic investors including Meituan, Pearl River Group, and New Hope Group, with multiple follow-on investments from existing shareholders. Publicly available information shows that Flexiv reached a post-money valuation of $1 billion in its 2022 B+ round, joining the unicorn ranks.
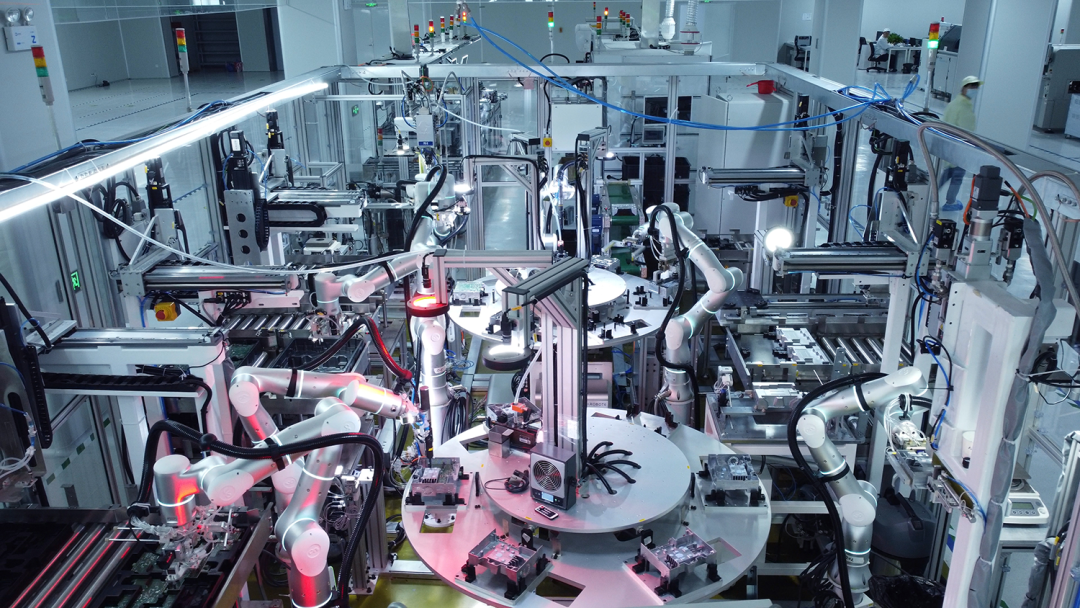
In terms of commercial deployment, Flexiv's adaptive robots have already entered production processes and lines including precision assembly, screw tightening, curved surface coating, flexible polishing, flexible packaging, surgical operations, massage therapy, laboratory automation, meat cutting, and food processing, covering automotive, 3C electronics, home appliances, fast-moving consumer goods, medical, biopharmaceutical, agriculture, and food industries.
01
Differentiation
From the start, ShiQuan Wang chose a completely differentiated path from existing robots on the market — building general-purpose robots through humanoid approaches.
The key distinction from most existing robots is that current robots largely use position control combined with additional visual or force sensors and substantial non-standard equipment, ultimately integrated into an intelligent solution. But in Wang's view, this technical framework limits robots' flexibility, generality, and range of applications.
Under this framework, robots mostly serve specific scenarios or perform structured tasks. Across industries, numerous tasks still can only be done by humans, challenging companies on product quality consistency, service quality, and overall costs — especially in precision industries like component insertion and assembly, complex surface grinding and polishing, as well as labor-intensive, harsh-environment scenarios like sorting, packaging, and food processing.
"Using humans as a reference, when people do things, the core concept isn't precise trajectory memory but rather using tactile force feedback to touch and adjust movements in real time. So the general-purpose robots we create need human-like dexterous limb structures, completing tasks primarily through tactile adjustment with visual guidance as a supplement, and through muscle memory, continuously learning and refining their skills," Wang told China Entrepreneur.
General-purpose robotics has been developing for five or six decades, yet penetration remains low. Wang believes a humanoid path centered on force sensing could be an excellent breakthrough point.
Moreover, unlike many robotics companies currently focused on visual exploration, Wang believes embodied intelligence is about real-world interaction. To make robots truly do things like humans, force control is more important than vision alone.
"It's about using hands or held tools to continuously interact with the environment — like how a newborn learns through interaction with the entire environment. They can't just look with their eyes; they need to experience, to use both hands and even their whole body to explore the physical world, projecting their perception-action loop onto a concrete world," Wang explained.
Even now, at the global level, very few are actually practicing a force-control-first theoretical route — it's in a state of non-consensus. But Wang firmly believes force control is a necessary step toward humanoid robots, ultimately achieving human-like or even superhuman capabilities.
02
Accumulation
A Morgan Stanley report released in late 2022 showed that global robot penetration stands at 0.9%, with robots accounting for roughly 1% of the labor market.
Wang has witnessed nearly 15 years of robot evolution. In his view, whether industrial or collaborative robots, development histories are long and prices have been driven very low, yet penetration remains low. He believes the most critical factor is that most robots on the market don't use tools or adapt to the real world in human-like ways — instead, the real world is modified to accommodate robots.
This is what motivated him to develop general-purpose robots. "General-purpose robots are called general-purpose because the product itself should already be able to adapt to various industries, without requiring extensive auxiliary equipment, on-site modification, and manual tuning costs."
In April 2019, at the Hannover Messe in Germany, Flexiv released its adaptive robot technology and showcased its first adaptive robotic arm, Rizon. After five years of iteration and optimization, Wang says Flexiv's robots can now adapt to production line environments.
For example, for certain vibrating conveyor lines — analogous to humans wiping a shaking table — Flexiv's adaptive robots no longer need someone to hold the table or incoming materials steady, nor do they require high-precision visual sensors. With direct-controlled contact force at the core, supplemented by low-cost visual judgment, they can adapt to the environment and complete work with guaranteed quality and efficiency.
At Stanford's Biomimetics and Dexterous Manipulation Laboratory, Wang had led and participated in projects including rock-climbing, underwater, and household humanoid robots. Flexiv co-founders Xiyang Ye and Shuyun Zhong are also PhDs and postdocs from Stanford's robotics labs, each with over 15 years of robotics hardware and software R&D experience. Flexiv's Chief AI Scientist Cewu Lu is a postdoc from Stanford's AI Laboratory and a professor at Shanghai Jiao Tong University's AI Laboratory, as well as a Changjiang Scholar.
In Stanford's various labs, Wang and the core founding team completed technical reserves in robotic force-control hardware and AI "brains" — the most essential parts of general-purpose robots themselves.
After more than eight years of accumulation, Flexiv's flywheel of technology, product, and business is spinning rapidly. In 2021, Flexiv's robot hardware essentially matured; by late 2022, Flexiv's core capabilities crossed the application value threshold the team had identified, beginning to win scalable replication orders; by late 2023, benefiting from mature product generality, Flexiv broke into new markets, accelerating cross-industry expansion.
Wang reflected with emotion: "This path is indeed long and difficult, requiring sufficient patience, but also very rewarding." And throughout this process, one of the moments they most enjoyed was the shift in customer perception.
When first approached, most customers would challenge them with "why could you solve this when others couldn't before?" It wasn't until Wang led his team to actually crack the problem and prove it to them that customers would completely rethink their previous judgments, even opening up more and more scenarios to the Flexiv team.
03
Focus
Most robotics entrepreneurs choose to go deep in one area before expanding to more applications, but Wang focused on generality from the very beginning.
Wang explains that focusing on general-purpose robots differs from focusing on industry-specific solutions — it's more about working backward from industries to understand the processes behind different scenario applications, distilling the commonalities in techniques underlying these processes, and focusing on common needs.
At founding, the Flexiv team discovered that in manufacturing, assembly and surface treatment each contained highly common techniques, from which thousands of industry sub-segments could radiate. Therefore, although Flexiv currently appears to have very diverse application scenarios and industry coverage, behind it all can be condensed into multiple different "meta-operations" performed by the same Flexiv robot models — techniques like pressing, inserting, rolling, wiping, twisting, tapping, and so on. These "meta-operations" only require different process parameter settings, or AI algorithms based on process understanding and visual judgment, to achieve different task objectives across various production lines and application scenarios.
In leading product development, on one hand, Wang matured the robot hardware through a force-control-primary, visual-recognition-secondary approach, making full-stack breakthroughs from sensors to drive units to overall control, ultimately optimizing the product with humans as the reference frame. On the other hand, Wang sought out scenarios that were labor-intensive, where processes hadn't been optimized for long periods, and where customers wanted automation but no mature solutions yet existed.
Generality determines a unique productization path. Wang notes that if you target one application point to dominate a small pond, then quickly move elsewhere, there are two natural challenges for the team:
First, for manufacturing, introducing each innovative application generally requires a very long process cycle to guide customers through trial and validation. This is determined by industry characteristics, degree of innovation, and business model — it can't be accelerated by increased investment or throwing more people at it.
Second, the broader environment and conditions across industries keep changing. Using the same strategy to pile onto one application point carries very high risk.
During eight years of R&D, because of the completely differentiated development path, Wang found that many components on the market didn't perform well enough. So from torque sensors, joint controllers, integrated joints, to arm planning algorithms, to operating systems, every link required in-house development.
But precisely because of this, every step taken has become a deep technical moat for Flexiv. From explicit and implicit process patents, to algorithm barriers, to the entire business model, Wang led the team to completely self-produce, self-iterate, self-develop applications, then feedback and iterate, continuously optimizing to form a flywheel effect.
04
Future
At the start of 2023, Flexiv released the world's first adaptive parallel robot and a new generation of general-purpose force-controlled gripper. Beyond this, notable was the release of its Qizhi AI system.
Like NVIDIA's CUDA computing platform built on its GPU hardware products, Flexiv's Qizhi AI system is similarly infrastructure laid out based on product uniqueness, aiming to empower the general-purpose robotics ecosystem so more people can create valuable things on this platform.
Today, a Flexiv solution combining robot hardware, software meta-operations, and AI is priced from around 100,000 to 300,000–400,000 yuan. After entering leading enterprises in different industries, it's beginning to create a certain benchmark effect. Wang says Flexiv achieves roughly 3x annual growth commercially.
Regarding future commercial growth potential, Wang said: "Actually, the industries Flexiv covers are already quite broad. Future growth in business volume, beyond sowing more seeds, will come more from how to truly turn the seeds and sprouting seedlings buried in each industry sub-segment into towering trees."
Looking back on this entrepreneurial journey, Wang said the first few years felt like an enjoyment period of technical exploration — everyone had a clear general direction, with a "just do it" mentality, quietly developing technology. By late 2019, when the team's robot product was officially released, they had their first seeds.
But then came a dark period. Because they were using completely new product routes and technical architectures, with no past reference frame, Wang and the team didn't even know how good core performance needed to be to satisfy application requirements. They could only continuously explore and push boundaries on various capabilities.
Meanwhile, Wang and the management team had to manage company operations and financing rhythms, balance organizational management during rapid team expansion, and manage customer expectations — getting them to patiently trust the team through a long application iteration period until final validation succeeded.
Once product maturity broke through the threshold for real industrial deployment, crossing mountains and ridges, some core capabilities had improved hundreds of times compared to launch. With the first success case, dawn finally broke, and the flywheel of technology, product, and commercialization kept accelerating. The company began growing as expected.
This is Wang's first time leading a startup, and he's finally become comfortable, with the team and business beginning to sprint and accelerate.
In his view, the ideal state of general-purpose robots will have three characteristics: first, it can complete various tasks with human-like or even superhuman quality and quantity — this is the most core, but also the hardest; second, the speed of learning veteran craftsmen's experience across different industries keeps increasing while costs decrease; third, the convenience and intelligence of interaction between robots with different skills and humans keeps improving.
These are breakthroughs that will come more and more in Flexiv's next ten years.
Recommended Reading

