Wuji Robotics' Pan Yunzhe: Dexterous Hands, Underrated Touch, and First Principles

Hardware has to go through round after round of trial production, constantly surfacing issues and steadily narrowing them down, before it can truly mature.
In 2018, Pan Yunzhe returned to China after graduating from UIUC and chose to start a company in an industry so mature it couldn't be more mature.
He didn't pick internet startups, because he didn't want to do what Elon Musk described in his autobiography: "watching the smartest minds of this generation rack their brains trying to get people to click on ads." He wanted to do something interesting. When he opened YouTube, his entire homepage was filled with robot videos.
Growing up watching Evangelion, Gundam, and Ghost in the Shell, robots had already left their mark on his life. The more he watched, the more he wanted to try building something with his own hands — a product that would make everyone gasp in amazement. When naming the company that would redefine dexterous hands, he recalled a line from The Ballad of the Puppets: "As I dance, beauty captivates the heart."
In 2023, ZhenFund made its first trip to Shanghai to meet Pan Yunzhe. The factory floor was vast and empty, surrounded by auto parts repair facilities. At a large table in the workshop, he talked about what he wanted to build and his vision for the future. Then, he upended his bag onto the table with a clatter, spilling out all kinds of motors, and proceeded to introduce each one — what it was, its performance specs, how its winding structure differed from the others.
In everything he does, Pan Yunzhe orbits around a single problem he wants to solve. The moment he writes down that "solution," nothing else matters; it's as if only this table exists in front of him. From the day he started his company, his only question has been: Can a dexterous hand actually match human capability?
Tactile sensing is an underestimated problem, and the "last mile" of embodied intelligence. With touch, you can solve 100% of problems; without it, you can only solve 30%, and at 30-50% the speed.
How far are dexterous hands from human hands? How much does one cost to build? Is shipping delayed? In a赛道 filled with waves and泡沫, Pan Yunzhe remains calm. He knows he has an efficient team, digging deep in the right direction, building better products with one-tenth the resources others use. He also understands hardware timelines: hardware products must go through round after round of trial production, exposing problems one by one.
The Wuji team is exactly this kind of people — those who get to the root of things, push themselves to the limit, and pursue genuine insight. This has also been Pan Yunzhe's attitude since graduating and starting his company: not waiting for the perfect time, not waiting for polished deliverables, but living fully in each present moment, continuously testing, improving, and maturing — delivering answers that exceed user expectations.
On September 17, Wuji Hand 1.0 was officially released. Weighing just 550g per hand, with a 1:1 human-hand form factor and 20 active degrees of freedom, it redefines the boundaries of robotic fine manipulation.
As Motoko says in Ghost in the Shell, "A person is made of many parts, each one unique — a face unlike any other, an unconscious tone of voice, a palm upon waking from dreams." Childhood memories, future destiny, and the information surging through his mind — all of these shaped Pan Yunzhe, and gave birth to Wuji.
The following article is Pan Yunzhe's own account.

Robots Are Like a Dark Magic
In 2018, I graduated with a bachelor's degree from the University of Illinois Urbana-Champaign (UIUC), double-majoring in computer science and chemistry. In 2017, internet opportunities were everywhere, and I initially considered internet entrepreneurship, interning at major domestic and international tech companies. But I later realized that what the industry was doing didn't actually interest me.
What struck me deeply was a line I read in Elon Musk's biography Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic Future: "The world's smartest minds are all working on how to get people to click more ads." At that moment, I thought the internet industry was pretty boring.
So I pivoted to hardware. But I didn't know anything about hardware either, didn't know where to start, so I taught myself by watching a lot of YouTube videos. I'd loved machine-related animations since I was a kid — whenever robot videos showed up on my homepage, I couldn't help but click, and the more I watched, the more I wanted to try building something myself. So the moment I graduated, I decided to work on robots.
The video that left the deepest impression was someone building a small humanoid robot that could ride a bicycle using servos, and another of MIT's Mini Cheetah robot dog doing a backflip. At the time, these videos were pure dark magic to me — especially that backflip moment, which immediately hooked me and made me desperate to figure out how it was done.
MIT's Mini Cheetah doing a backflip (Image source: The Verge)
Even earlier, in 2003, when I was in first grade, I watched an anime called Tianying Zhanshi — actually the first domestic release title for Neon Genesis Evangelion. It was graphic, with plenty of violence and bloody elements that gave me frequent nightmares, but it also completely overturned my worldview. Later in middle school, I started watching Gundam and more mecha anime. So you could say my fascination with robots started young.
Later I founded Wuji Technology. The name comes from Ghost in the Shell — Kenji Kawai composed a soundtrack called The Ballad of the Puppets (Utai), with a line "吾が舞えば、麗し女、酔ひにけり" meaning roughly that the dance intoxicates the beauty. That atmosphere deeply moved me. Because our initial goal was to build high-dynamic-performance legged robots, starting from motor research, I hoped that someday when people saw our robots, they would feel curious, drawn in, even captivated — so I chose this name.

First Principles of Learning
I think the core of learning is that you must start with a problem — a problem you genuinely want to solve.
I wasn't very efficient in school classes, because the classroom gives you ready-made solutions without first telling you what the problem is. When studying partial differential equations, the professor would jump straight into eigenvalues and various proofs, but never say what problem we were actually trying to solve, or explain the real value of these things.
My learning approach starts from the problem: I need a clear problem, then I break down what modules it requires, what the underlying logic is.
If I'm weak in some area, I'll find the corresponding textbook and study it deeply. When I have a viable idea, I'll read papers or talk to industry experts. As my learning went deeper, I gradually built up a foundational layer of understanding. At a certain point, I didn't even need to rely on papers or experts anymore — I could judge whether an approach was feasible, where its difficulties lay, and what needed verification. This ability is extremely important to me; it lets me quickly identify risk points and challenges when building products.
I posted something on WeChat Moments very early on: "If you have a computer and an internet connection, you can learn all the knowledge in the world." I've always felt the greatest meaning of the internet is making information flow — almost all knowledge can be found online, which is also why GPT can be so intelligent.
Learning itself doesn't excite me; sometimes not finding answers is quite painful. But the most exciting part of learning is when you start from a problem, and through learning discover whether that problem even has a solution, or see a viable path on a problem that has never been solved before. That moment is what satisfies me.
During the pandemic, I was home for two months. For us hardware people, if you're away from your means of production, you can't make anything. At that time, I was repeatedly studying a robotics textbook. I didn't really get it the first two times; by the third and fourth readings, I gradually understood what it was saying. Its problem was the same as what I just described: it tells you there's a formula, here's how to use it, but doesn't explain why we need this formula, where it comes from, or what problem it solves. Many derivations seem to pull formulas out of thin air, then plug them in to complete the proof — which felt very unsatisfying to me.
Robotics is clearly a discipline you can see and touch; all physical quantities, reasoning, and inferences should have strong logical connections. The meaning and value of each formula, where it actually comes from, what problem it solves — these should all be strung together by a single thread of logic.
But in all the textbooks I've read, this was never clearly explained; the intuitive meanings of those physical quantities were never connected to our real physical intuition. Yet these things are crucial for doing robot control and understanding different robot types.
So I thought, I might as well sort this out myself. After all, it's a complex system and theoretical framework, and I could only straighten it out by systematically documenting it — so I wrote my own textbook.
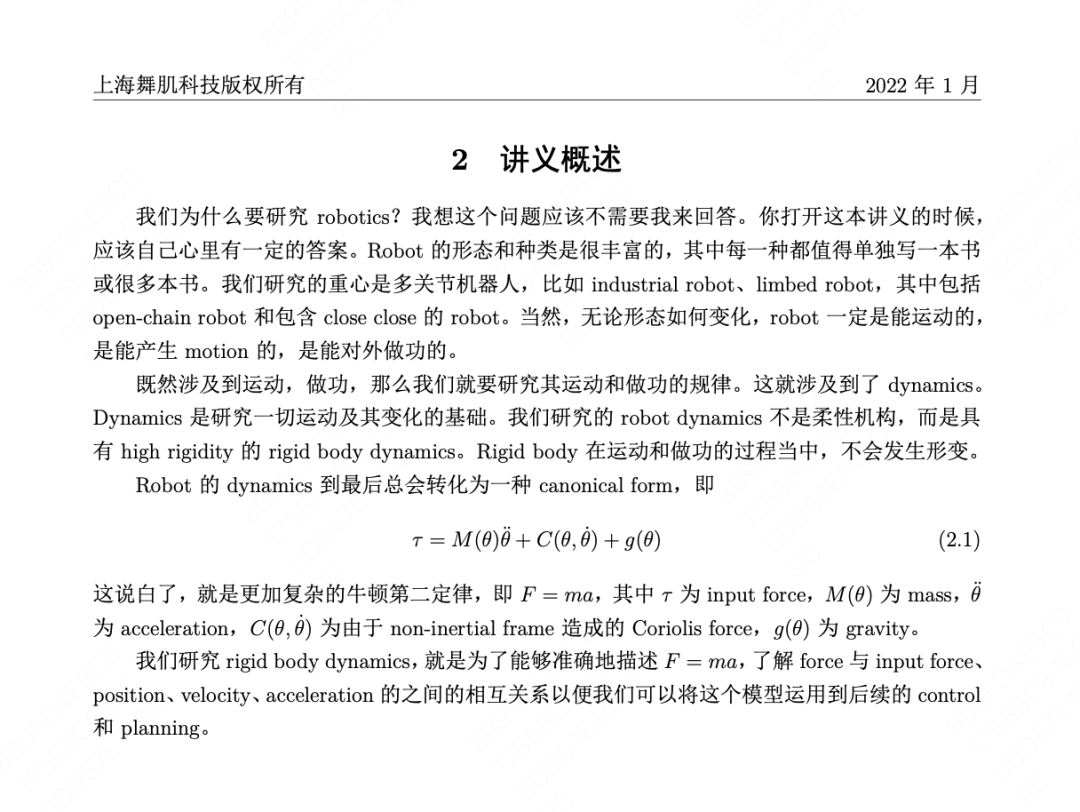
Outline of Pan Yunzhe's self-authored textbook Rigid Body Mechanics for Robots
This way of thinking also influences how I define products. As Jobs said, connect the dots. To define a product, you need to string all the dots into a complete logical thread: Where are the technology boundaries? Where are the hardware bottlenecks and potential? What are the software limits? What do customers actually need? What problems remain unsolved?
Only when all these dots are logically connected can you build a good product. The process of learning robotics theory is essentially connecting various formulas, physical quantities, and phenomena into a complete coherent thread.
The satisfaction entrepreneurship brings is similar. First, when you discover an unsolved problem and find a completely new approach; second, when your product performs as expected, powers on, and passes all tests. For example, when we were debugging our dexterous hand and it could complete movements that no previous dexterous hand could do — that feeling was truly unforgettable.

The Last Centimeter of Embodied Intelligence
If dexterous hands aren't done well, it's hard to say the manipulation problem of embodied intelligence is solved. And the dexterous hand is the hardest, most critical link in this chain.
From first principles, no one in the entire industry can confidently say "dexterous hands have already reached human hand capability." Everyone has more or less doubts about this. Even we ourselves couldn't be completely certain of the answer before we started. But many problems are like this — if you don't do it, you'll never know if it can be solved. And the dexterous hand problem is valuable enough that we must do it, must answer this question: Can a dexterous hand actually match human capability?

Wuji Technology team at work
Now you see many embodied intelligence companies using two-finger grippers to do all kinds of things — one reason is because that's all they have on hand, another is because that's all they know how to use, so when making demos they naturally pick movements that two-finger grippers can complete.
But I think two-finger gripper capability is essentially an extremely small subset of dexterous hand functionality. Think of it this way: a two-finger gripper is like a hand without a thumb. When you still have four fingers but no thumb, most of your grasping ability is lost. There's also a medical disability classification: losing your pinky is a minor injury, but losing your thumb is a severe injury — which precisely illustrates the thumb's importance.
A huge number of objects in the human world are rod-shaped or have handles. For two-finger grippers, grasping stability for these things is always problematic; there are inherent physical limitations.
The second angle is data. The core of dexterous manipulation is based on large amounts of human data, and I believe the two-finger gripper data modality is not scalable. It might achieve quick deployment in some simple scenarios, but when you need to handle more complex situations, or rise to higher-level world models, it falls short.
The third angle is interaction mode. For example, asking a two-finger gripper to operate a TV remote is nearly impossible. Someone might say the robot could just control the remote through an API — but that returns to traditional PLC thinking: you use code to connect systems, which of course works, but that's a completely different matter from the problem of manipulation itself.
There are only three ways to collect data with two-finger grippers:
-
Teleoperation
-
Real people wearing two-finger grippers to collect data
-
Simulation (sim-to-real)
The first two methods are hard to scale massively. The third is highly controversial — whether it can produce general intelligence, whether it can truly help robots understand the world, remains unknown. In comparison, human-based data is the most reliable, and to transfer human data, you must have an actuator that approximates human hand morphology.
Dexterous hands happen to satisfy this, while also being able to iterate very quickly. So I believe the dexterous hand is the most worthwhile core problem to tackle in embodied intelligence manipulation.

Tactile Is an Underestimated Problem
There are already quite a few companies making dexterous hands now, and some have started shipping, but the manipulation problem itself hasn't been truly solved. As long as this problem remains unsolved, there remains massive opportunity and room for growth.
Embodied intelligence is obviously a very hot赛道 right now, with泡沫, and also excellent peers practicing their own product approaches. But regardless of what stage the industry is in, whether there's泡沫 or not, companies that seriously want to build good products and solve core problems have always been very rare.
Starting from the functional definition of human hands, I believe there are five most important dimensions for dexterous hands:
-
Degrees of freedom must be sufficiently close to human;
-
Size and weight must be close to human;
-
Reliability must be high enough, lifespan at least ten million cycles, ensuring stable use for two to three years;
-
Full-palm data capability;
-
Soft skin like a human's.
Currently no product on the market satisfies all five points simultaneously.
This also shows that tactile sensing is a severely underestimated problem. Analogous to computer vision — the reason it could flourish is because of mature sensors, such as CMOS-based RGB cameras, backed by tens or even hundreds of billions of dollars in market demand pushing sensor performance to mature. Tactile sensing currently has at least 3-4 orders of magnitude less investment than vision.
But I believe tactile sensors are equally important. Vision corresponds to the human visual cortex; touch corresponds to the human somatosensory cortex. Touch determines how robots interact with the physical world. If there were a truly excellent tactile sensor, its potential market value should be on the same order as CMOS sensors. The significance of touch mainly includes several points:
First, it can greatly improve manipulation efficiency. Relying entirely on visual closed-loop control is very slow — like asking you to do fine tasks with your feet, the operational efficiency drops dramatically.
Second, touch improves manipulation safety. Without tactile closed-loop, robots don't know how much force to apply, easily damaging objects from excessive force. But with tactile closed-loop, this basically doesn't happen.
Third, tactile sensors enable you to collect large amounts of diverse data. Without sufficient data closed-loop, you can't truly make good use of touch.
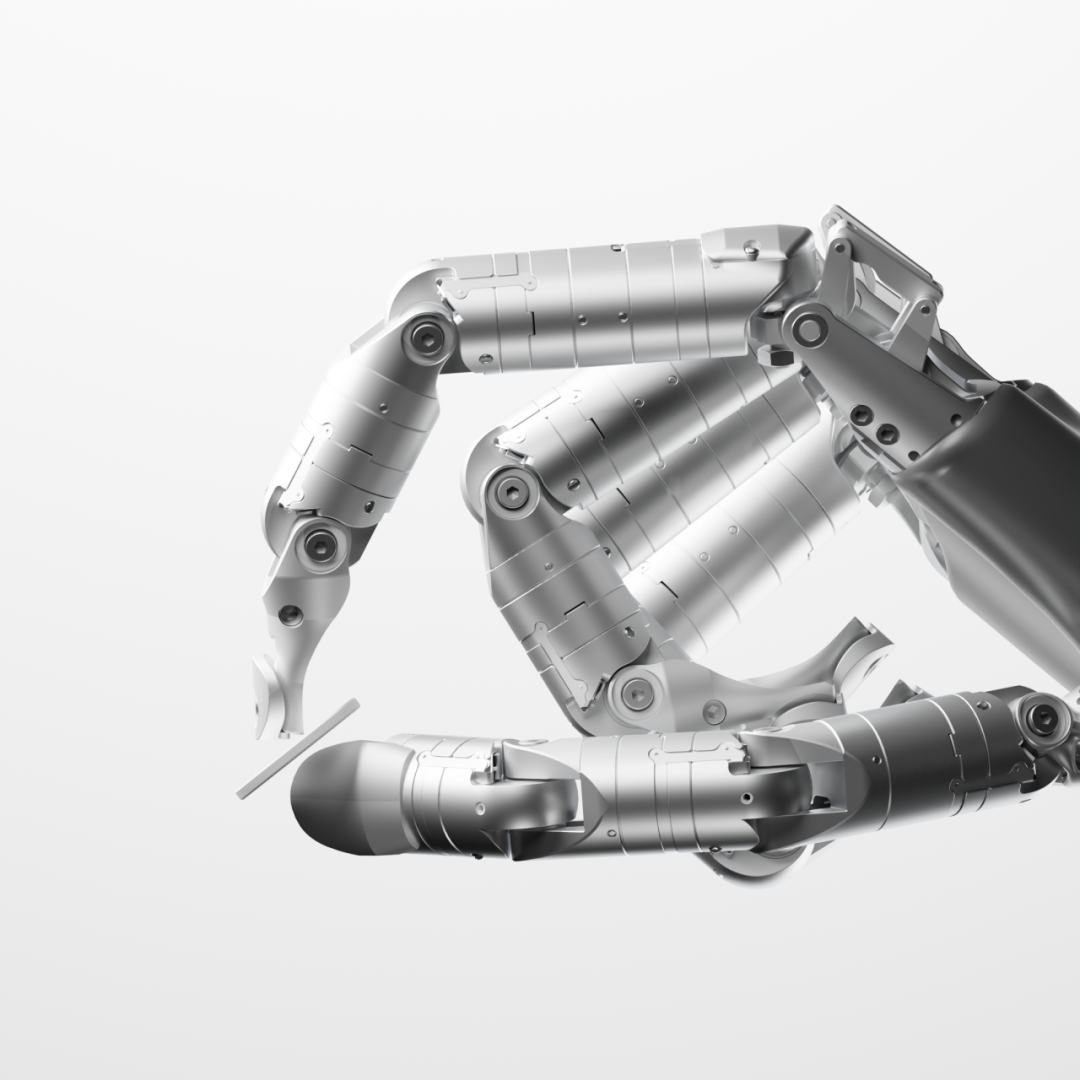
Wuji Technology dexterous hand render
Human tactile modalities are extremely complex — not just pressure, but also deformation, temperature, humidity, and other signals. To date, no system has been able to fully capture these modalities. We believe tactile sensors will ultimately have to take the form of gloves, because you must collect data from human bodies.
But from first principles, human touch operates in three-dimensional space, while making it into a glove means accomplishing this on a two-dimensional surface — which is inherently extremely difficult. This is also why the tactile problem hasn't been well-solved, and simultaneously means there's enormous opportunity here.
I believe that in ten years, most physical labor will be replaced by robots. Most manipulation of the physical world will be done by robots, not humans. Humans will mostly handle information and make decisions.

Building Hardware Means Constantly Exposing Problems Through Debugging
We're very efficient with capital. With very limited funds, we've self-developed various motors, reducers, and controllers, going deep to the most fundamental level, building everything from processes to manufacturing equipment ourselves. We've not only established production lines capable of mass production, but also completed multiple rounds of trial production, building better products than others with one-tenth their resources.
The five product-standard dexterous hands I mentioned earlier don't currently exist on the market. And we believe Wuji is the first company that can satisfy these points and achieve mass production and shipping.
I believe hardware R&D must respect fundamental time laws. We greatly admire DJI — it's the most organizationally capable company I know of. But even DJI needs at least 12-18 months to do the same thing. Because hardware products simply require round after round of trial production, constantly exposing problems and converging, to truly mature.
Hardware problems always exist — either you test them yourself, or you let users test them. Each round of testing must iterate and adjust for the problems found; this is the most basic timeline for hardware.
Normally, a mass-producible hardware product needs at least 3-4 rounds of trial production, sometimes 5-6 rounds. This cycle can't be compressed from 12 months to 6 months. If someone launches a product in 6 months, it necessarily means insufficient testing rounds — by the time it reaches users' hands, it's an inadequately validated product. We don't want that.
We want what we deliver to users to at least meet their expectations, or even exceed them. This is our basic product philosophy.
Our team has also expanded rapidly this year. In October 2024, our group of 13 people moved to Shenzhen. By March of the following year, numbers kept climbing, and now we have over 100 people working on dexterous hands.
Through the hiring process, I've gradually distilled three traits I most admire:
First, genuine insight. The ability to use excellent logical thinking to find the most core, most critical point in complex environments with many variables, and actually execute on it.
Second, getting to the root. When encountering problems, not simply copying existing experience, but understanding from underlying logic, gathering as much information as possible, finding the most essential root cause, and then solving it.
Third, pushing to the extreme. This term comes from DJI, and I love it because it represents an attitude: I must do things well, and have the will and ability to do the best possible with limited resources, even better than others. This intrinsic motivation is what I admire.

Wuji Technology team photo
Our company happens to gather such people. Such people thrive at Wuji. We share a common mission and spirit, and working together is truly enjoyable.
Finally, to those considering entrepreneurship: the best time to start a company is right now. Don't hesitate, don't wait for the perfect moment — just do it. Because you can only encounter real opportunities in the process of continuous progress.
The audio version of this content is also available on ZhenFund's podcast Seriously Speaking — welcome to listen!

Text | Cindy Video | Dylan & Xin
Podcast | Neya & Ruitong